
NIOP Project
**[NIOP 2021 Catalog](https://docs.google.com/presentation/d/e/2PACX-1vRS_wjQQ6BRHuAZOAdV0fuNQ7mv1HWGTFVjcsWZbNEojf5vmZf62t5-cFMYDVLULDjglEX7DC0jYOze/pub?start=true&loop=false&delayms=60000)**
**[Homepage on NIOP Guide](https://docs.google.com/presentation/d/e/2PACX-1vTNxw8Qn_97Yk792zQgCn7fxmNKBbxH5OzkqWfO_0TpXb9JFHHHRC_E2t3_lSilb-tUmplQbT8jzlvZ/pub?start=true&loop=false&delayms=60000 "Homepage on NIOP Guide")**
Our history:
Led by Nate Munro, the No Insurance-Optimized Prosthetic (NIOP) Design Team has enlisted numerous designers, prosthetists, and bionics experts from within the e-NABLE community and has released multiple devices to facilitate a modular arm catalog that can be adapted to fit most all upper limb difference cases.
This project page is intended to help the NIOP team make this work more visible, collaborate ideas, distribute files, and to recruit design talent (possibly even you!)
The NIOP project was based on the idea of an expanded catalog of modular options for the Kwawu, so that it could fit people who were missing an elbow. When I lost my arm, I met Shelby's sister (Shelby is the namesake of the Shelbow) in the hospital, and since then it was my goal to make this device a reality for her.
The finished NIOP arm, including hardware and sized for an adult female, weighed only 1-1/2 lbs (1 lb 9 oz), which is significantly lighter than traditional prosthetic devices, which made Shelby ecstatic, as she had an $80K myoelectric sitting in her closet because it was too heavy for her to wear comfortably.
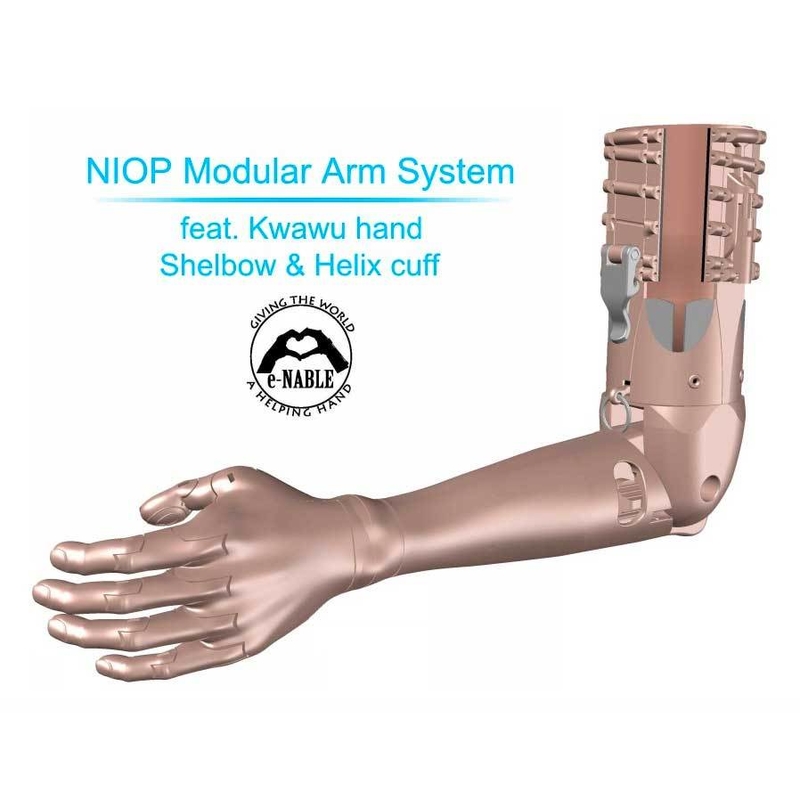
This device combines the first 5 modules from the NIOP modular arm system, and I recommend most parts be printed in PETG, with TPU for the Kwawu hinges in the fingers. They are:
1. the NIOP Kwawu hand remix,
2. the NIOP Kwawu forearm remix,
3. connected with the standard NIOP Wrist Pin,
4. the Shelbow,
5. and the Helix cuff
All of the NIOP products will be released as open source commercial-use designs like the Kwawu, but other designers are free to make NIOP compatible devices under whatever licensing they like, and take credit for their designs as long as they acknowledge the NIOP team with their remix.

In the near future, we will hopefully be able to offer NIOP compatible bionic versions and the Moto-Gripper hand/Adjustowrap Gripper Arm (by Skip Meetze's team).
Everything in the NIOP system will be scaled and sized by the same OpenSCAD system used in the Kwawu, and ultimately all the design files will be available in Fusion360 format, although I've been using AutoCAD for expediency to get all the designs prototyped.
This has been a community driven effort, and the NIOP really needs the community's buy-in and support it to truly become the platform to establish standard connections so development is much more cohesive between all of our designs. The option is always open to re-make the wheel like we love to do, but now people can connect their designs into the rest of the NIOP system so they can concentrate their efforts on specific modules and know that it connects into solid components for a functional device.
If you are a developer working on a device that you think would be compatible or are interested in helping with this project, please do contact me or someone in the NIOP design team. The work load expands exponentially with a modular system like this, and we could definitely use more help as we build the NIOP catalog. You can also email me at [munrocadsolutions@gmail.com.](mailto:munrocadsolutions@gmail.com)
Please leave comments. Feedback from the community is what will help me to improve the devices to truly make this e-NABLE's flagship design.
NIOP Stories
* [e-NABLE Evansville - NIOP Related Work](wiki:/s/niop-no-insurance-optimized-prosthetics/wiki/99/e-nable-evansville-niop-related-work "e-NABLE Evansville - NIOP Related Work") by Donna Zimmerman