Sign in / up
Forum
Chapters
Devices
Badges
Links
Dashboard
Spaces
Calendar
Menu
e-NABLE Forum
Get information, ask questions, share stories, and meet other volunteers!
EF
16K
Posts
31
Members
0
Followers
Space
menu
Welcome
Stream
e-NABLE Devices Catalog
Recent Social Media
This Month's e-NABLE Meetings
Wiki
Calendar
Gallery
About
Permalink
Krzysztof Grandys
e-NABLE Forum
·
Dec 6, 2021
·
Visible also to unregistered users
Communications, Stories, & Case Studies
Device Information
Challenges & Frustrations
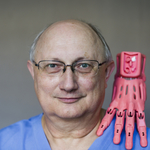
**How can I help him?** Do you have any idea how to help him? Crab hand, the fingers have no active, only passive movement. I think about Kinetic Hand without last finger, but maybe someone has a better idea?
Hidden Gallery
‹
›
×


Alexander (Maverick - EU-RO) ·
Rick Williams, PhD ·
Connie Marchek ·
Rick Williams, PhD ·
Krzysztof Grandys ·
Alexander (Maverick - EU-RO) ·
Peter Smith ·
Peter Smith ·
Alexander (Maverick - EU-RO) ·